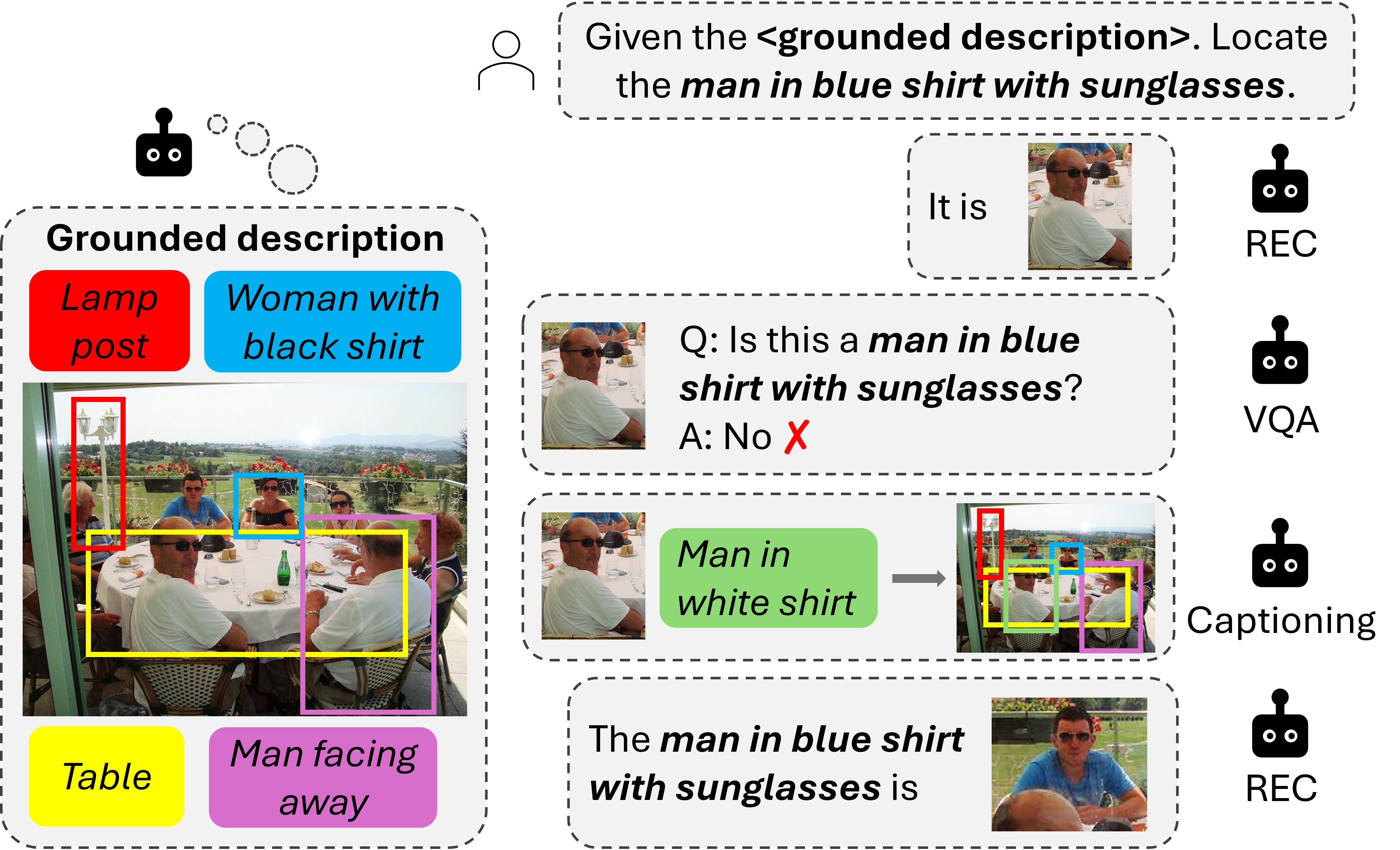
Chain-of-Caption: Training-free improvement of multimodal large language model on referring expression comprehension Yik Lung Pang , Changjae OhPublished in ICASSP, 2026 arXiv | Paper | Webpage
LaVA-Man: Learning Visual Action Representations for Robot Manipulation Chaoran Zhu , Hengyi Wang , Yik Lung Pang , Changjae OhPublished in CoRL, 2025 arXiv | Paper | Webpage
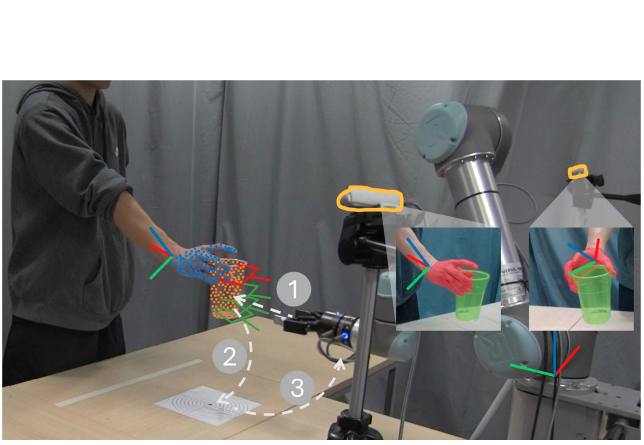
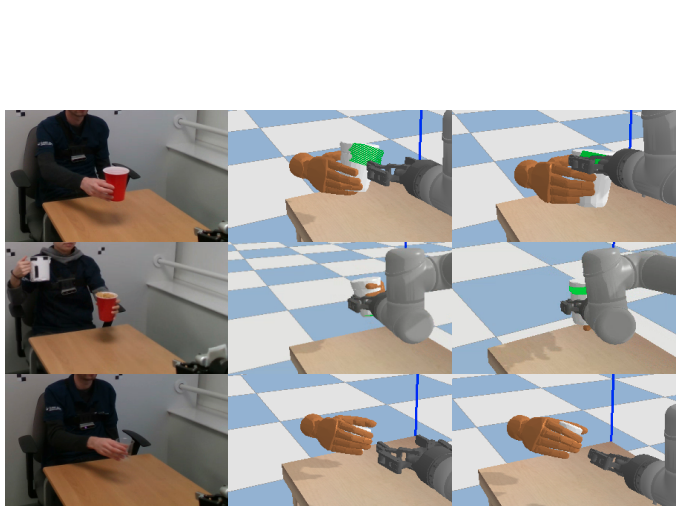
Learning human-to-robot handovers through 3D scene reconstruction Yuekun Wu , Yik Lung Pang , Andrea Cavallaro , Changjae OhPublished in RO-MAN, 2025 arXiv | Paper | Webpage
Stereo hand-object reconstruction for human-to-robot handover Yik Lung Pang , Alessio Xompero , Changjae Oh , Andrea CavallaroPublished in RA-L, 2025 arXiv | Paper | Webpage
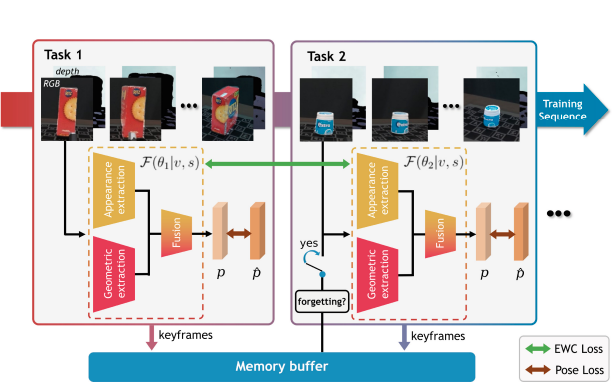
Incremental Object 6D Pose Estimation Long Tian , Amelia Sorrenti , Yik Lung Pang , Giovanni Bellitto , Simone Palazzo , Concetto Spampinato , Changjae OhPublished in ICPR, 2024Paper | Webpage
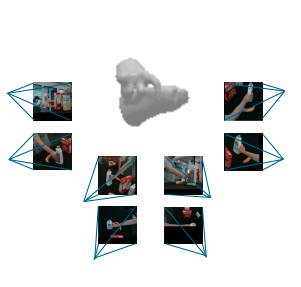
Sparse multi-view hand-object reconstruction for unseen environments Yik Lung Pang , Changjae Oh , Andrea CavallaroPublished in CVPRW (Workshop for Learning 3D with Multi-View Supervision), 2024 arXiv | Paper
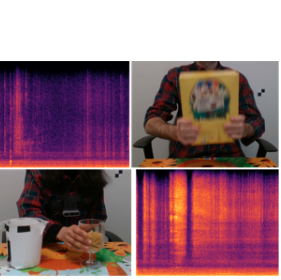
Audio-visual object classification for human-robot collaboration Alessio Xompero , Yik Lung Pang , Timothy Patten , Ahalya Prabhakar , Berk Calli , Andrea CavallaroPublished in ICASSP, 2022 arXiv | Paper | Webpage
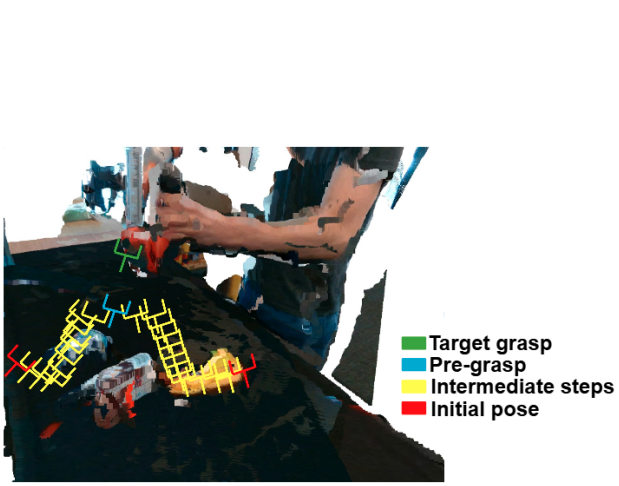
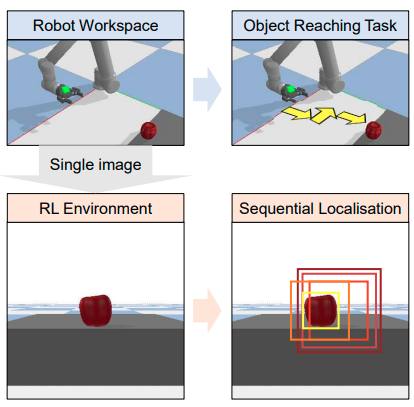
OHPL: One-shot hand-eye policy learner Changjae Oh , Yik Lung Pang , Andrea CavallaroPublished in IROS, 2021 arXiv | Paper | Webpage
Towards safe human-to-robot handovers of unknown containers Yik Lung Pang , Alessio Xompero , Changjae Oh , Andrea CavallaroPublished in RO-MAN, 2021 arXiv | Paper | Webpage